技术加速软机器人的热驱动
- 2021-12-14 17:02:19 生物科学网
- 症状

北卡罗来纳州立大学的研究人员提出了一种新的热致动器设计,可用于在软机器人设备中实现快速运动。
“对于软机器人来说,使用热驱动并不是什么新鲜事,但软热驱动的最大挑战是它们相对较慢——而我们已经让它们变得很快,”该论文的通讯作者和 Andrew A. Adams 的 Yong Zhu 说北卡罗来纳州机械与航空航天工程特聘教授。
执行器是设备的一部分——例如软机器人——通过将能量转化为功来产生运动。
“使这种新的执行器设计起作用的是一种具有双稳态设计的结构,”该论文的第一作者和博士生吴双说。北卡罗来纳州立大学的学生。“想想一个按扣的发夹。它是稳定的,直到你施加一定的能量(通过弯曲它),然后它会咬合成不同的形状——这也是稳定的。”
在新的热致动器的情况下,材料是双稳态的,但材料更喜欢哪种形状取决于温度。
这是它的工作原理。研究人员将两种材料叠在一起,中间是银纳米线。这两种材料具有不同的热膨胀系数,这意味着它们在加热时以不同的速率膨胀。实际上,这意味着结构在加热时会弯曲。
然后将这种分层材料塑造成一种设计,使其在一个方向上具有默认曲率 - 假设它向下弯曲。当电压施加到银纳米线时,材料会升温,使其向另一个方向弯曲。一旦达到某个温度——临界温度——材料就会迅速变成新的默认形状,并迅速弯曲。当电压被移除时,温度会回落。一旦冷却超过另一个临界温度,材料就会迅速恢复到其先前的默认形状,并迅速向下弯曲。注意两个临界温度不同;第一个更高。通过以规则模式向纳米线施加电流,您可以使材料来回弹跳。
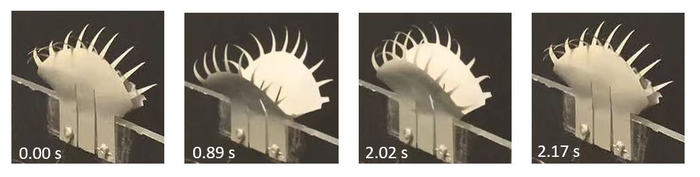
为了演示该技术,研究人员创建了两个原型。其中一个原型模拟了捕蝇草的捕捉行为,而另一个原型是能够每秒移动超过一个身体长度的“爬行器”。
“潜在的应用范围从生物医学应用到假肢设备再到高端制造,”朱说。“您希望能够快速移动,但又希望避免使用刚性材料和传统机器人的任何应用。”
下一步包括开发传感器和控制机制,使驱动过程更完全自动化,使其比纯手动控制更有效地运行。
“我们也有兴趣探索其他可能的材料,以便我们可以微调热性能和机械性能,”朱说。“这可以让我们定制执行器的速度和力。”
本文地址:http://www.jiuyinews.cn/zhengzhuang/2021-12-14/562090.html
友情提示:文章内容为作者个人观点,不代表本站立场且不构成任何建议,本站拥有对此声明的最终解释权。如果读者发现稿件侵权、失实、错误等问题,可联系我们处理
- 上一篇:星星矫形头盔提醒您:宝宝头型很关键
- 下一篇:遗传自闭症患者的新希望
- 巨野康泽精神病医院因过度检查等问题被处罚2025-03-15 19:09:41
- 济南中医白癜风医院的医保协议被解除2025-03-15 19:09:04
- 山东颐养健康集团华丰医院因重复收费等违法行为被查处2025-03-15 19:08:40
- 临沂兰山凯旋老年养护院医院伪造医学文书等问题被查处2025-03-15 19:08:11
- 东营润康医院超标准收费等违法行为被查处2025-03-15 19:07:48

-

 灵活就业人员社保缴费怎么交?2022年灵活就业人员社保缴费多少钱?
灵活就业人员社保缴费怎么交?2022年灵活就业人员社保缴费多少钱?
2022-06-13
-
 2022年五险一金缴费标准最低是多少?五险一金一个月大概交多少钱?
2022年五险一金缴费标准最低是多少?五险一金一个月大概交多少钱?
2022-08-11
-
15个信号暗示你怀孕了
2022-07-04 12:49:27
-
五险一金多少钱?五险一金缴费标准是多少?
2022-07-01 16:03:05
-
2022年社保缴费基数六个档次是什么?每个月扣多少钱
2022-06-30 15:21:11
-
社保个人缴纳多少钱一个月2022?2022年社保个人缴纳比例是多少?
2022-06-23 09:37:45
-
18种常见的皮肤病图片分享 皮肤病对照图症状及名称
2022-07-06 22:50:18
